Technology
Solution
Mocopi
Document
About Us
Contact Us
Download
Store
JA
/ EN
Technology
Solution
Document
About Us
Contact Us
Download
Store
JA
/ EN
Goodbye,
clunky controllers.
Goodbye,
clunky controllers.
Hello,
ContactGlove
Hello,
ContactGlove
> Buy Now
Our mission
ハードウェアレベルの最適化で、人間が最高のパフォーマンスを発揮できるインターフェースを提供する。
> Learn more
ContactGlove does the
Hand Tracking
Haptic Feedback
Input Interface
SMA based haptics feedback
Hand Tracking / Input Interface
Used for
Gaming
ContactGlove を使えば、これまでにないほど VR ゲームに没入することができます。高精度のハンドトラッキングと触覚フィードバックにより、より直感的でインタラクティブなゲーム体験が可能になります。物体の把持から呪文の唱え方まで、ContactGlove があれば VR ゲームの可能性は無限大に広がります。
Simulations
ContactGlove は、VR でのリアルなシミュレーションを実現したい人に最適なデバイスです。ハンドトラッキング機能と触覚フィードバックにより、実生活と同じようにタスクを実行したり、オブジェクトを操作したりすることができます。仮想世界の探索、仕事のためのトレーニング、新しいスキルの習得など、ContactGlove はシミュレーション体験をより魅力的で直感的なものにしてくれます。
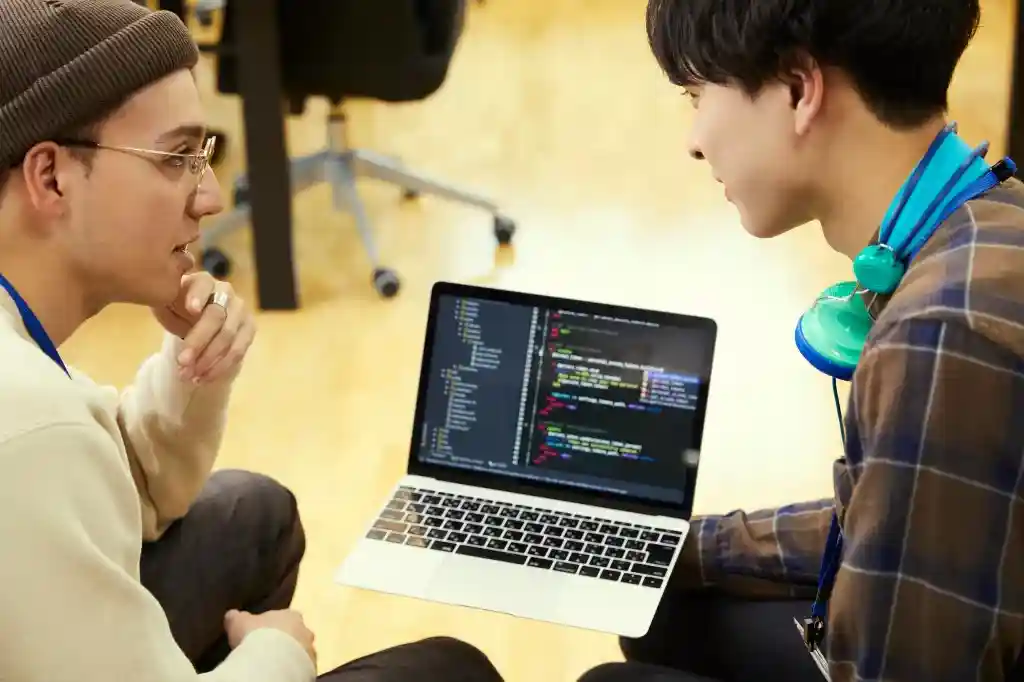
Motion Tracking
ContactGlove は低価格ながら業界最高峰レベルのハンドトラッキングを提供します。独自開発した曲げセンサと指の開き検出センサにより、装着者の指の状態を正確にトラッキングします。ビデオゲームや 3D アニメーション用のモーション制作・科学的研究に最適なデバイスです。
News
> More
Recruit
現在募集中の職種はありません。
> Recruit
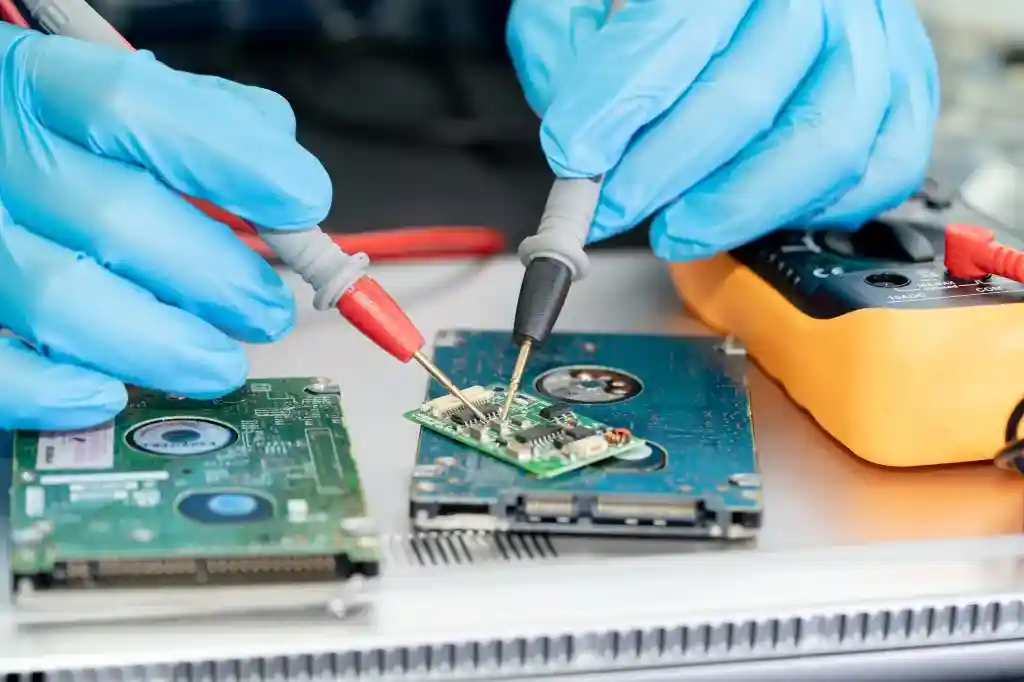
Partnership
VR関連ソフトウェア、ハードウェアの受託開発を行っています。国内で数少ないVRハードウェアの開発知見を活かし、御社のアイデアの実現を最大限サポートします。また、VRハードウェア開発企業ならではの理解の深さを活かし、弊社のグローブを活用したコンテンツ開発も受け付けております。
> Partnership
Support
製品に関するお問い合わせはこちらからお願いします。
> Support
%20rotate(-90)'%3e%3cline%20id='Line_15'%20data-name='Line%2015'%20x2='4.527'%20y2='5'%20transform='translate(189.5%20134.5)'%20fill='none'%20stroke='%23ffffff'%20stroke-linecap='round'%20stroke-width='1.5'/%3e%3cline%20id='Line_16'%20data-name='Line%2016'%20x1='4.527'%20y2='5'%20transform='translate(193.985%20134.5)'%20fill='none'%20stroke='%23ffffff'%20stroke-linecap='round'%20stroke-width='1.5'/%3e%3c/g%3e%3c/svg%3e) Solution
Solution%20Copyright%202022%20Fonticons,%20Inc.%20--%3e%3cpath%20d='M400%2032H48C21.5%2032%200%2053.5%200%2080v352c0%2026.5%2021.5%2048%2048%2048h352c26.5%200%2048-21.5%2048-48V80c0-26.5-21.5-48-48-48zm-48.9%20158.8c.2%202.8.2%205.7.2%208.5%200%2086.7-66%20186.6-186.6%20186.6-37.2%200-71.7-10.8-100.7-29.4%205.3.6%2010.4.8%2015.8.8%2030.7%200%2058.9-10.4%2081.4-28-28.8-.6-53-19.5-61.3-45.5%2010.1%201.5%2019.2%201.5%2029.6-1.2-30-6.1-52.5-32.5-52.5-64.4v-.8c8.7%204.9%2018.9%207.9%2029.6%208.3a65.447%2065.447%200%200%201-29.2-54.6c0-12.2%203.2-23.4%208.9-33.1%2032.3%2039.8%2080.8%2065.8%20135.2%2068.6-9.3-44.5%2024-80.6%2064-80.6%2018.9%200%2035.9%207.9%2047.9%2020.7%2014.8-2.8%2029-8.3%2041.6-15.8-4.9%2015.2-15.2%2028-28.8%2036.1%2013.2-1.4%2026-5.1%2037.8-10.2-8.9%2013.1-20.1%2024.7-32.9%2034z'/%3e%3c/svg%3e)
%20Copyright%202022%20Fonticons,%20Inc.%20--%3e%3cpath%20d='M186.8%20202.1l95.2%2054.1-95.2%2054.1V202.1zM448%2080v352c0%2026.5-21.5%2048-48%2048H48c-26.5%200-48-21.5-48-48V80c0-26.5%2021.5-48%2048-48h352c26.5%200%2048%2021.5%2048%2048zm-42%20176.3s0-59.6-7.6-88.2c-4.2-15.8-16.5-28.2-32.2-32.4C337.9%20128%20224%20128%20224%20128s-113.9%200-142.2%207.7c-15.7%204.2-28%2016.6-32.2%2032.4-7.6%2028.5-7.6%2088.2-7.6%2088.2s0%2059.6%207.6%2088.2c4.2%2015.8%2016.5%2027.7%2032.2%2031.9C110.1%20384%20224%20384%20224%20384s113.9%200%20142.2-7.7c15.7-4.2%2028-16.1%2032.2-31.9%207.6-28.5%207.6-88.1%207.6-88.1z'/%3e%3c/svg%3e) Solution
Solution